
最新发布
-

SoftFoot Pro新型仿生假肢
新的SoftFoot Pro仿生脚原型是一种无运动、灵活的假肢脚,灵感来自人类四肢的解剖结构,由热那亚的意大利理工学院与比萨大学合作设计.它的设计在国际上是独一无二的,旨在为残疾人提供灵活的技术假肢,并为未来的人形机器人提供解决方案。...
作者:ROBOT@qwh 日期:2024.07.15 分类:机器人 81 -

0.305秒成为最快破解魔方的机器人
三菱公司因最快解决魔方的机器人而荣获吉尼斯世界纪录称号。该机器人的时间为 0.305 秒,打破了之前的 0.38 秒纪录。...
作者:ROBOT@qwh 日期:2024.06.24 分类:机器人 238 -
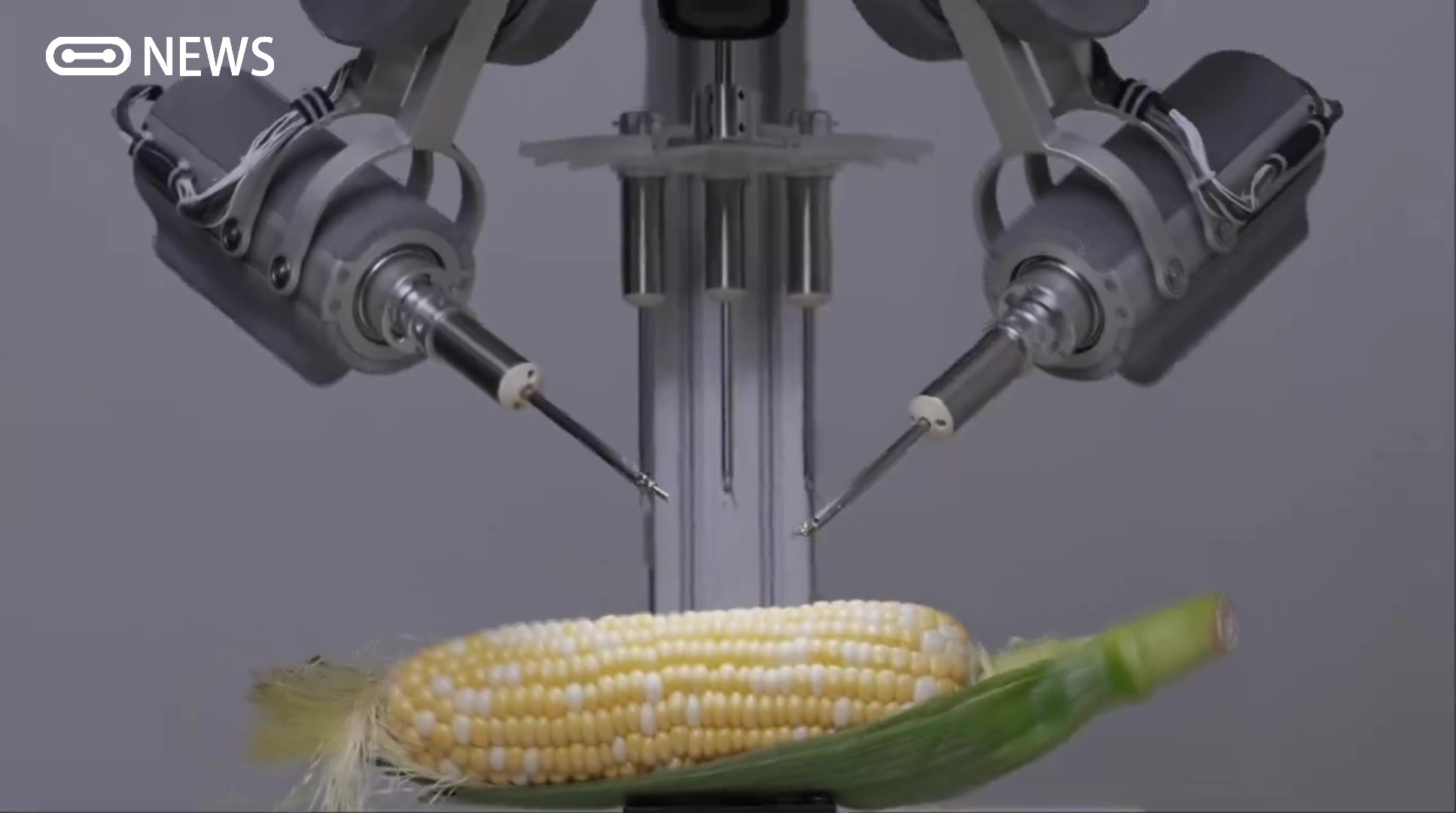
超微创手术辅助机器人缝合玉米粒
索尼开发了一种机器人,可以利用显微镜和高灵敏度的控制装置来跟踪外科医生的手部动作,并对静脉和神经等小组织进行精细的手术。...
作者:ROBOT@qwh 日期:2024.05.19 分类:机器人 568 -
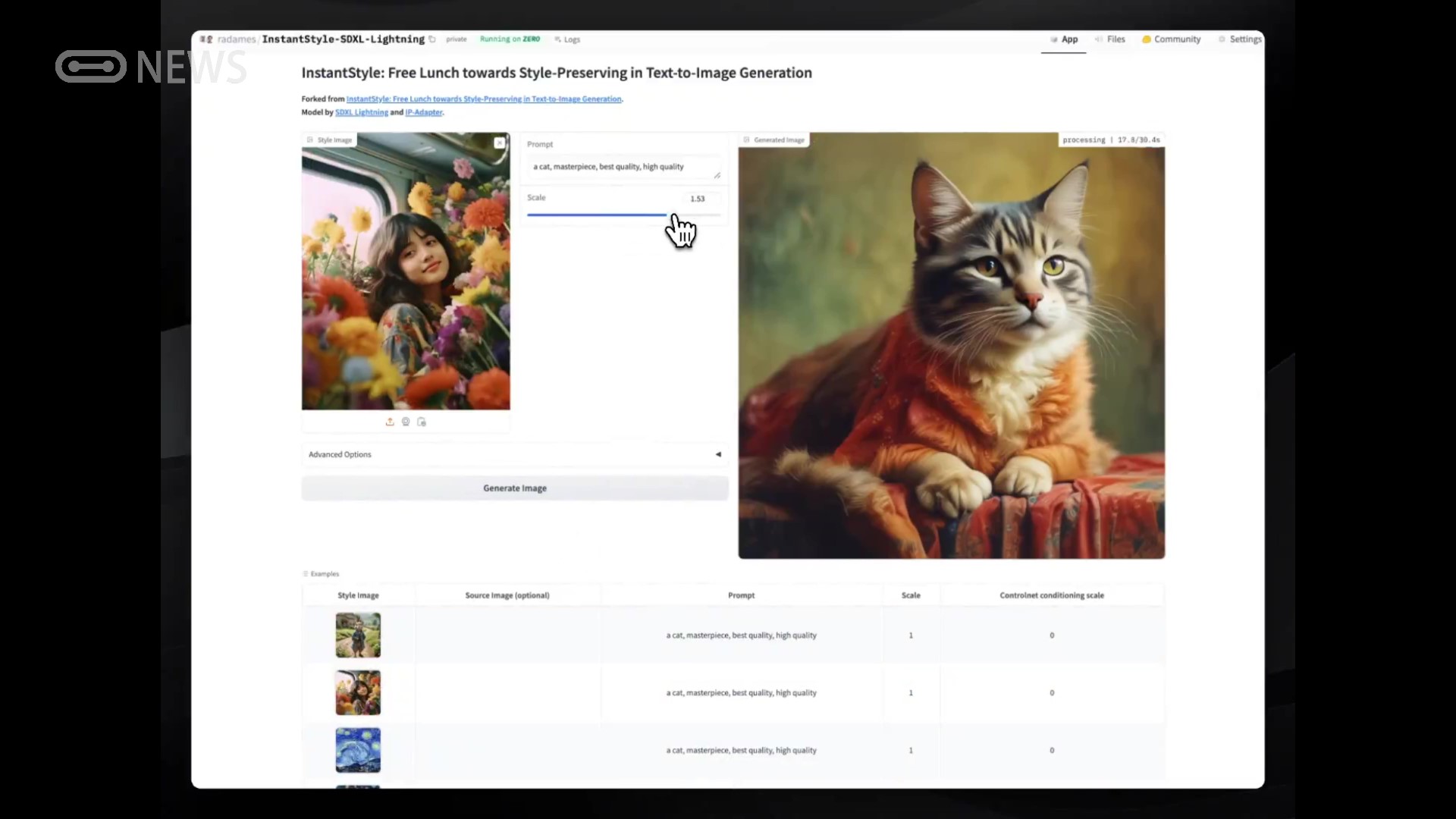
图像风格提取InstantStyle
从文本生成与样例图像风格一致的图像。Llama3免费使用:https://huggingface.co/spaces/radames/InstantStyle-SDXL-Lightning...
作者:ROBOT@qwh 日期:2024.05.15 分类:人工智能 438 -
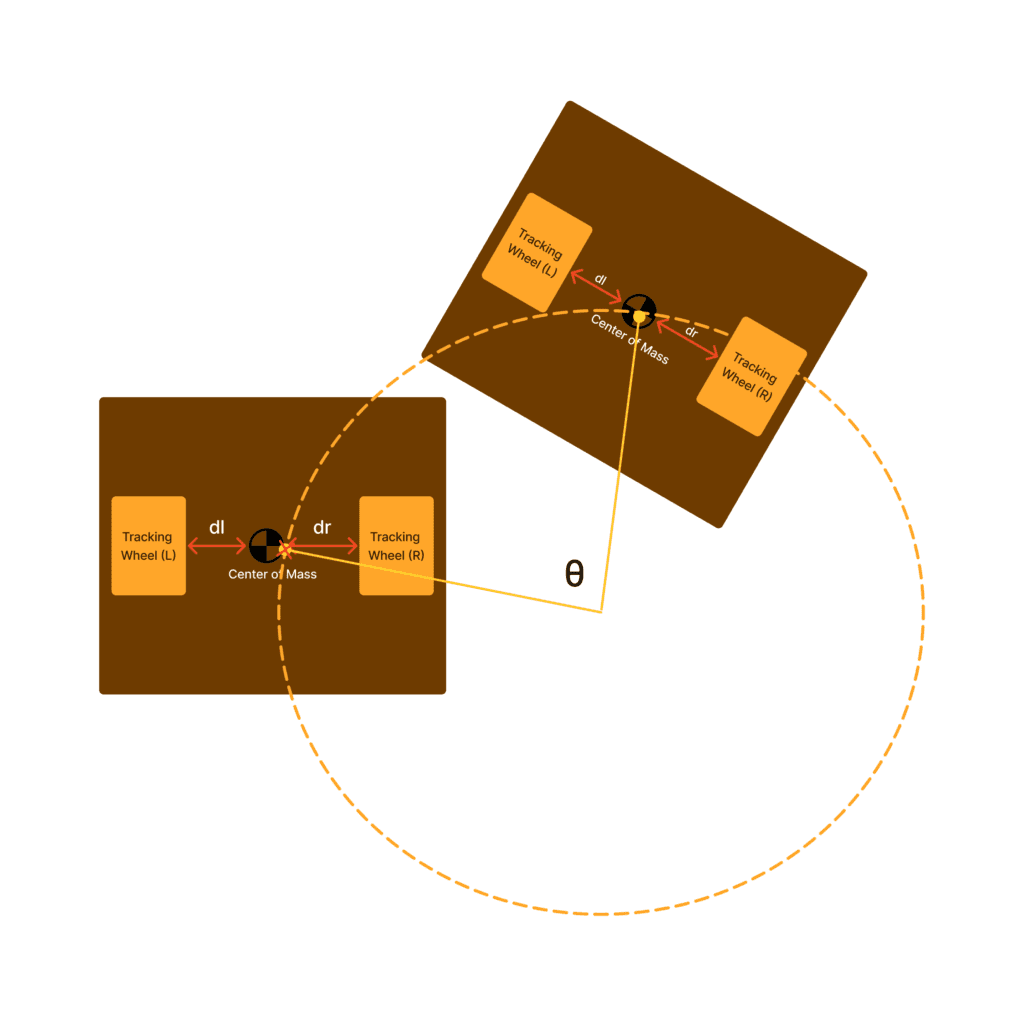
轮式移动机器人的里程计计算
在移动机器人领域,准确估计机器人的位置和方向对于成功导航和控制至关重要。用于实现此目的的一种常用技术是计算里程计。里程计是通过分析车轮运动和旋转来估计机器人位置和方向(或统称为姿势)的过程。在本文中,我们将主要关注移动机器人,并且本文建立在坐标变换的先验知识的基础上,这些知识将用于在探索环境时推导更新的机器人姿势。了解里程计里程计(也称为航位推算) 的原理是,轮式机器人行驶的距离可以通过测量其轮子的旋转来确定。通过测量每个轮子的旋转运动并应用运动学方程,可以估计机器...
作者:ROBOT@qwh 日期:2024.05.06 分类:学习教程 572 -
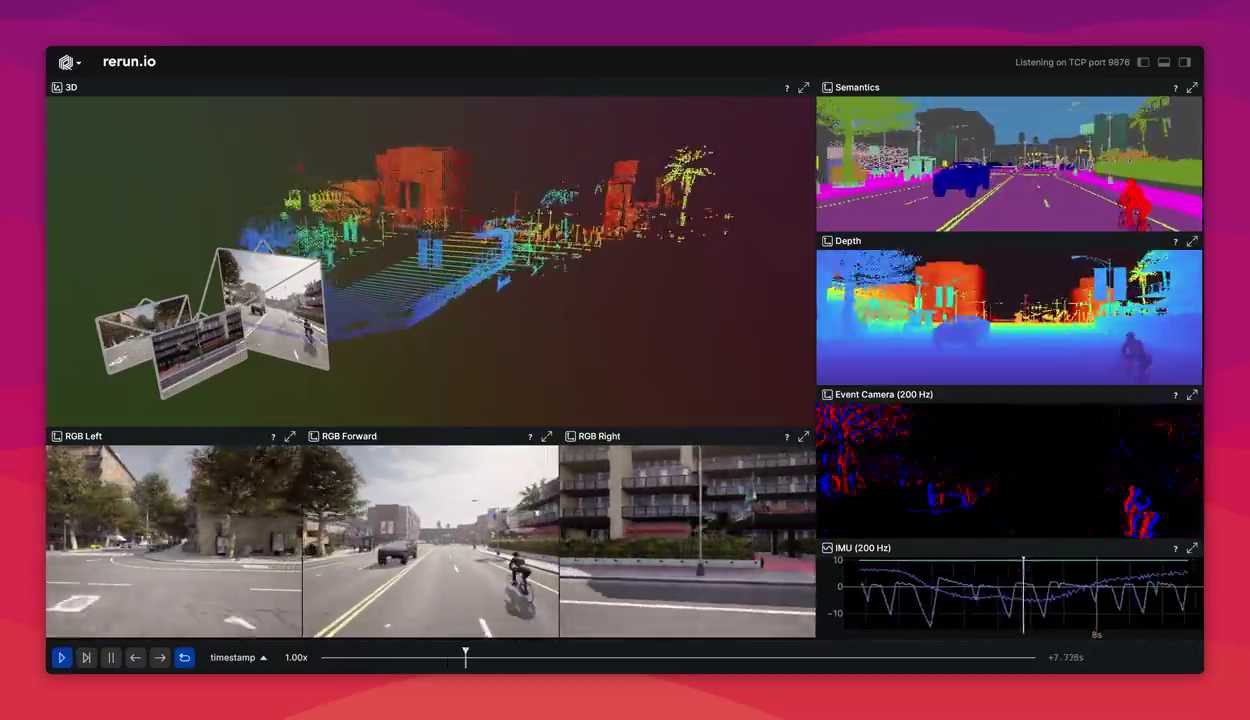
机器人Sim-to-Rerun 可视化工具
Sim-to-Rerun:使用 Rerun 通过#ROS 2 可视化 CARLA 模拟器输出。此示例可视化了 Rerun 中用于自动驾驶的 CARLA 模拟器的模拟传感器数据。它使用 Rerun 的新概念验证 C++ ROS2 桥接器构建,该桥接器目前支持一组有限的消息类型。据我们所知,Rerun 是目前性能最高的多模态可视化工具,已被世界上一些最好的团队使用。我们将继续努力让 Rerun 为更多机器人团队所用,而这个示例和 PoC ROS 2 桥是朝着这个方向迈出的又一步。...
作者:ROBOT@qwh 日期:2024.05.03 分类:机器人 719 -

微软静态图片视频生成框架VASA
微软公司最近推出了一种基于单一静态图像和语音音频剪辑的具有视觉情感技能(VAS)的虚拟人物逼真说话脸生成框架VASA。模型VASA-1不仅能够产生与音频同步的嘴唇动作,而且还能够捕捉到大量的面部细微差别和自然的头部动作,从而有助于感知真实性和活力。核心创新包括在面部潜在空间中工作的整体面部动力学和头部运动生成模型,以及利用视频开发这种具有表现力和解纠缠性的面部潜在空间。通过广泛的实验,包括对一组新指标的评估,我们表明我们的方法在各个方面都明显优于以前的方法。我们的方法不仅提供...
作者:ROBOT@qwh 日期:2024.04.18 分类:人工智能 1012 -

Open Robotics 成立开源机器人联盟
开源机器人基金会 (OSRF)很高兴地宣布成立开源机器人联盟 (OSRA),这是一项新举措,旨在加强我们开源机器人软件项目的治理并确保机器人操作系统 (ROS) 的健康发展) 套件社区将在未来的许多年里持续发展。 OSRA 将效仿 Linux 基金会和 Eclipse 基金会等其他成功的开源项目基金会,采用混合会员制和精英管理模式。OSRA 向所有社区利益相关者发出公开邀请,参与 OSRF 开源项目(ROS、Gazebo、Open-RMF 及其基础设施)的技术监督、指导、开发...
作者:airobotnews 日期:2024.03.22 分类:机器人 1343 -

NVIDIA 宣布推出适用于人形机器人的 GR00T 项目基础模型
Isaac 机器人平台现为开发人员提供新的机器人训练模拟器、Jetson Thor 机器人计算机、生成式 AI 基础模型以及 CUDA 加速感知和操作库NVIDIA 今天宣布推出 GR00T 项目,这是一个用于人形机器人的通用基础模型,旨在进一步推动机器人技术和具体人工智能领域的突破。作为该计划的一部分,该公司还推出了一款用于基于 NVIDIA Thor 片上系统 (SoC) 的人形机器人的新型计算机 Jetson Thor,以及对 NVIDIA Isaac™ 机器人平台的重...
作者:airobotnews 日期:2024.03.22 分类:机器人 1255 -

OpenAI:马斯克希望我们与特斯拉合并或“完全控制”
据称,特斯拉和SpaceX的亿万富翁首席执行官埃隆·马斯克希望人工智能研究公司OpenAI要么与特斯拉合并,要么让他完全控制该组织。OpenAI 的一篇博文回应了马斯克对该公司提起的诉讼,披露了 2015 年至 2018 年马斯克仍参与公司运营时的电子邮件通信。 据报道,在 2017 年 OpenAI 正在探索向营利性模式转型以获取更多资金的一封电子邮件中,马斯克希望获得多数股权、董事会控制权以及首席执行官职位。然而,OpenAI 认为这种由个人控制的程度有悖于其使命。“埃隆...
作者:airobotnews 日期:2024.03.07 分类:人工智能 1109
热门文章
-
康普顿未来智慧农场
 康普顿未来农场,使用更少的水和1%的土地,即可实现与产统农业相同产量....
康普顿未来农场,使用更少的水和1%的土地,即可实现与产统农业相同产量.... -
拆解 OpenAI 的新董事会
 在人工智能和技术领域掀起波澜的惊人事件中,人工智能领域的领先实体 OpenAI 最近的领导地位发生了重大转变。以萨姆·奥尔特曼 (Sam Altman) 戏剧性地重返首席执行官职位以及随之而来的董事会改组为标志,这些变化代表了该组织的关键时刻。OpenAI 以其在人工智能研究和开发方面的开创性工作而闻名,包括广泛认可的 ChatGPT 和 DALL-E 模型,站在人工智能进步的最前沿。因此,董事会的重组不仅仅是人员的变动,还标志着人工智能领域最具影响力的组织之一的方向、优先事...
在人工智能和技术领域掀起波澜的惊人事件中,人工智能领域的领先实体 OpenAI 最近的领导地位发生了重大转变。以萨姆·奥尔特曼 (Sam Altman) 戏剧性地重返首席执行官职位以及随之而来的董事会改组为标志,这些变化代表了该组织的关键时刻。OpenAI 以其在人工智能研究和开发方面的开创性工作而闻名,包括广泛认可的 ChatGPT 和 DALL-E 模型,站在人工智能进步的最前沿。因此,董事会的重组不仅仅是人员的变动,还标志着人工智能领域最具影响力的组织之一的方向、优先事... -
一种自动确定计算机游戏状态中可能动作的方法
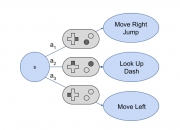 由于手动彻底测试视频游戏软件非常困难,因此需要拥有能够自动探索不同游戏功能的人工智能代理。此类代理的关键要求是玩家动作的模型,代理可以使用该模型来确定不同游戏状态下的可能动作集,以及对代理策略选择的游戏执行选定的动作。目前使用的典型游戏引擎不提供这样的动作模型,导致现有的工作要么需要人工手动定义动作模型,要么不精确地猜测可能的动作。在我们的工作中,我们通过为游戏中存在的用户输入处理逻辑开发最先进的分析方法来演示程序分析如何有效解决该问题,该分析可以使用离散动作空间自动建模游戏...
由于手动彻底测试视频游戏软件非常困难,因此需要拥有能够自动探索不同游戏功能的人工智能代理。此类代理的关键要求是玩家动作的模型,代理可以使用该模型来确定不同游戏状态下的可能动作集,以及对代理策略选择的游戏执行选定的动作。目前使用的典型游戏引擎不提供这样的动作模型,导致现有的工作要么需要人工手动定义动作模型,要么不精确地猜测可能的动作。在我们的工作中,我们通过为游戏中存在的用户输入处理逻辑开发最先进的分析方法来演示程序分析如何有效解决该问题,该分析可以使用离散动作空间自动建模游戏... -
使用众包反馈来帮助训练机器人
 为了教人工智能代理一项新任务,比如如何打开厨房柜子,研究人员经常使用强化学习——这是一种试错过程,在该过程中,代理会因采取更接近目标的行动而获得奖励。在许多情况下,人类专家必须仔细设计奖励函数,这是一种激励机制,赋予代理人探索的动力。当智能体探索并尝试不同的动作时,人类专家必须迭代地更新奖励函数。这可能非常耗时、效率低下,并且难以扩展,尤其是当任务复杂且涉及许多步骤时。来自麻省理工学院、哈佛大学和华盛顿大学的研究人员开发了一种新的强化学习方法,该方法不依赖于专门设计的奖励函数...
为了教人工智能代理一项新任务,比如如何打开厨房柜子,研究人员经常使用强化学习——这是一种试错过程,在该过程中,代理会因采取更接近目标的行动而获得奖励。在许多情况下,人类专家必须仔细设计奖励函数,这是一种激励机制,赋予代理人探索的动力。当智能体探索并尝试不同的动作时,人类专家必须迭代地更新奖励函数。这可能非常耗时、效率低下,并且难以扩展,尤其是当任务复杂且涉及许多步骤时。来自麻省理工学院、哈佛大学和华盛顿大学的研究人员开发了一种新的强化学习方法,该方法不依赖于专门设计的奖励函数... -
HierSpeech++:通过零样本语音合成新架构
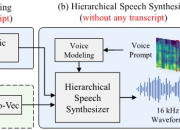 基于大语言模型(LLM)的语音合成已广泛应用于零样本语音合成中。然而,它们需要大规模数据,并且具有与以前的自回归语音模型相同的局限性,包括推理速度慢和缺乏鲁棒性。本文提出了 HierSpeech++,一种快速、强大的零样本语音合成器,用于文本到语音(TTS)和语音转换(VC)。我们验证了分层语音合成框架可以显着提高合成语音的鲁棒性和表现力。此外,即使在零样本语音合成场景中,我们也显着提高了合成语音的自然度和说话人相似度。对于文本到语音,我们采用文本到向量框架,该框架根据文本表...
基于大语言模型(LLM)的语音合成已广泛应用于零样本语音合成中。然而,它们需要大规模数据,并且具有与以前的自回归语音模型相同的局限性,包括推理速度慢和缺乏鲁棒性。本文提出了 HierSpeech++,一种快速、强大的零样本语音合成器,用于文本到语音(TTS)和语音转换(VC)。我们验证了分层语音合成框架可以显着提高合成语音的鲁棒性和表现力。此外,即使在零样本语音合成场景中,我们也显着提高了合成语音的自然度和说话人相似度。对于文本到语音,我们采用文本到向量框架,该框架根据文本表...
