
麻省理工学院的研究人员开发了一种基于摄像头的触摸传感器,它又长又弯曲,形状像人类的手指。他们的设备在大面积上提供高分辨率的触觉感应,可以使机器人手执行多种类型的抓取。图片:由研究人员提供
作者:亚当·泽维 |麻省理工学院新闻
想象一下,用一只手抓住一个重物,比如管扳手。您可能会用整个手指抓住扳手,而不仅仅是指尖。皮肤中的感觉受体沿着每个手指的整个长度运行,会向你的大脑发送有关你正在掌握的工具的信息。
在机器人手中,使用摄像头获取有关抓取物体信息的触觉传感器又小又扁,因此它们通常位于指尖。反过来,这些机器人只用指尖来抓取物体,通常是捏合的动作。这限制了它们可以执行的操作任务。
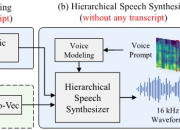
麻省理工学院的研究人员开发了一种基于摄像头的触摸传感器,它又长又弯曲,形状像人类的手指。他们的设备可在大面积上提供高分辨率触觉感应。这种名为GelSight Svelte的传感器使用两个镜子来反射和折射光线,以便位于传感器底部的一个摄像头可以沿着整个手指的长度看到。
此外,研究人员还构建了具有柔性骨干的手指形传感器。通过测量手指接触物体时骨干的弯曲方式,他们可以估计施加在传感器上的力。
他们使用GelSight Svelte传感器来生产一只机器人手,能够像人类一样抓住重物,使用所有三个手指的整个感应区域。这只手还可以执行与传统机器人抓手相同的捏抓。

“因为我们的新传感器是人类手指形状的,我们可以用它来为不同的任务做不同类型的抓握,而不是对所有事情都使用捏抓。使用平行钳口抓手只能做这么多。我们的传感器确实为我们可以用机器人完成的不同操作任务开辟了一些新的可能性,“机械工程研究生,GelSight Svelte论文的主要作者Alan (Jialiang) Zhao说。
赵与资深作者爱德华·阿德尔森(Edward Adelson)一起撰写了这篇论文,爱德华·阿德尔森是大脑与认知科学系的约翰和多萝西·威尔逊视觉科学教授,也是计算机科学和人工智能实验室(CSAIL)的成员。该研究将在IEEE智能机器人和系统会议上发表。
镜子镜子
触觉传感器中使用的相机受到其尺寸、镜头焦距和视角的限制。因此,这些触觉传感器往往又小又扁,这将它们限制在机器人的指尖上。
对于较长的感应区域,更类似于人类手指,相机需要远离感应表面才能看到整个区域。由于机器人抓手的尺寸和形状限制,这尤其具有挑战性。
赵和阿德尔森使用两个镜子解决了这个问题,这两个镜子将光线反射和折射到位于手指根部的单个相机上。
GelSight Svelte包含一个平面的倾斜镜子,该镜子位于相机对面,另一个长而弯曲的镜子位于传感器的背面。这些镜子重新分配来自相机的光线,使相机可以看到整个手指的长度。
为了优化镜子的形状、角度和曲率,研究人员设计了模拟光反射和折射的软件。
“有了这个软件,我们可以轻松地了解镜子的位置以及它们的弯曲方式,以了解我们实际制造传感器后图像的外观,”赵解释说。
镜子、摄像头和两组用于照明的 LED 连接到塑料骨架上,并包裹在由硅胶制成的柔性表皮中。相机从内部观察皮肤的背面;根据变形,它可以看到接触发生的位置并测量物体接触表面的几何形状。

此外,由于传感器上不同位置的颜色饱和度,红色和绿色LED阵列可以了解在抓取物体时凝胶被按下的深度。
研究人员可以使用这种颜色饱和度信息来重建被抓取物体的3D深度图像。
传感器的塑料主干使其能够确定本体感受信息,例如施加在手指上的扭转扭矩。当抓住物体时,骨干会弯曲和弯曲。研究人员使用机器学习来估计根据这些骨干变形施加到传感器上的力。
然而,将这些元件组合成一个工作传感器并非易事,赵说。
“确保镜子的曲率正确,以匹配我们在仿真中的曲率是非常具有挑战性的。另外,我意识到有一些强力胶会抑制硅的固化。制造出真正有效的传感器需要进行大量实验,“他补充道。
多功能抓握
一旦他们完善了设计,研究人员通过将物体(如螺丝)压在传感器上的不同位置来测试GelSight Svelte,以检查图像清晰度,并查看它如何确定物体的形状。
他们还使用三个传感器来构建一个可以执行多种抓握的GelSight Svelte手,包括捏抓,横向捏抓和使用三个手指的整个感应区域的力量抓握。大多数机器人手的形状像平行的下颚滴头,只能执行捏抓。
三指力量抓握使机器人手能够更稳定地握住较重的物体。但是,当对象非常小时,捏合仍然很有用。他说,能够用一只手执行两种类型的抓握将使机器人更具多功能性。
展望未来,研究人员计划增强GelSight Svelte,使传感器铰接并可以在关节处弯曲,更像人类的手指。
“光学触觉手指传感器允许机器人使用廉价的相机收集表面接触的高分辨率图像,通过观察柔性表面的变形,机器人估计接触形状和施加的力。这项工作代表了GelSight手指设计的进步,改进了全手指覆盖率以及使用图像差异和机器学习近似弯曲偏转扭矩的能力,“斯坦福大学机械工程助理教授Monroe Kennedy III说,他没有参与这项研究。“提高机器人的触觉以接近人类的能力是必要的,也许是开发能够完成复杂,灵巧任务的机器人的催化剂问题。
这项研究部分得到了丰田研究所的支持。
版权声明
本文仅代表作者观点,不代表本网站立场。
本文系作者授权本网站发表,未经许可,不得转载。







发表评论